4️⃣ L'émulateur
Prérequis
- Télécharger l'archive de l'émulateur .7zip.(74 Ko)
Vous aurez une archive 7zip telle que:
┏ DeviceModel/
┃ ┣━ Config.cfg
┃ ┗━ Model.cfg
┗ INNO_MachEmulator_ver1.2.52.exe
Fonctionnement
Une fois l'archive extraite, lancez le .exe.
Sélectionnez un layout dans la liste déroulante grisée (🤷♂️), de préférence RT-240-Occulus.
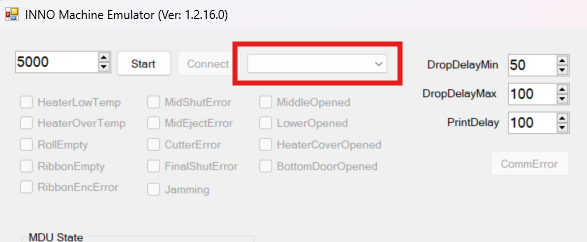
Ensuite, cliquez sur Start puis Connect.
Lien avec le logiciel JAS
Côté JAS, en cliquant sur  en haut à droite.
en haut à droite.
Vous devriez voir le statut changer de

Puis

Enfin

Indiquant alors que la communication entre le simulateur de robot et JAS est faite.
Simuler une production
-
Créez un dossier
C:\JAS\Order. -
Placez un fichier
.xmlrésultant de MyEureka dans ce dossier.
Vous pouvez essayer avec celui-ci.
JAS détecte automatiquement l'ajout d'un fichier dans ce dossier et procède à des vérifications.
Si le fichier convient, un dossier Backup/ est créé.
S'il détecte une erreur, un dossier Error/ est créé.
- Visualisez vos données.
Vous devriez avoir quelque chose dans le genre:
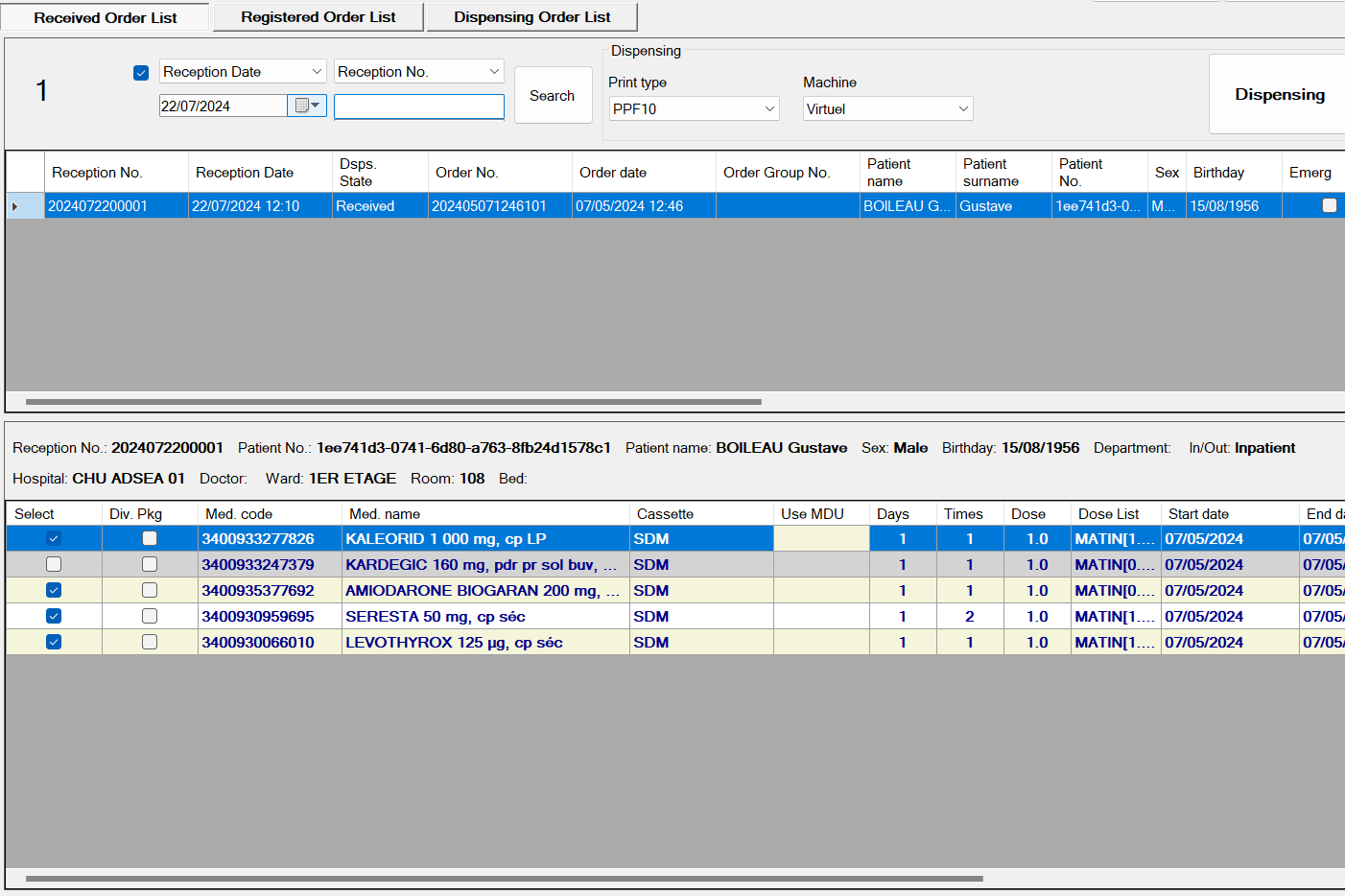
-
Cliquez sur Dispensing.
Votre production est prête à être traitée par le robot. -
Cliquez sur Run.
Votre robot s'éxecute et produit les sachets-doses/pilluliers. -
Prenez note qu'un dossier
C:\JAS\post_productiona été créé et contient les medlogs résultants des productions.
Ces fichiers sont a intégrer avec la commandemyeureka:import-medlogsde MyEureka.